| | | Allestimento dell' ARCUS per le gare GPS - SkyNavigator |  |
| | | Autore | Messaggio |
|---|
Gianni Vetrini

Messaggi : 22
Data d'iscrizione : 30.12.10
Età : 76
Località : Città S. Angelo (Pe)
| | Titolo: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Sab Gen 22, 2011 8:47 pm | |
| Le gare per alianti in scala con assistenza del GPS, sono una realtà matura e si svolgono regolarmente in un circuito Europeo. Maggiori informazioni su www.gps-eurocup.ch, questo sito ha una sezione scritta in italiano ed è facilmente consultabile.
L’idea è nata quando ci si è posti la domanda di come organizzare delle gare per grandi alianti in scala, la risposta è stata la più semplice e naturale: farli gareggiare come gli alianti veri, ovvero descrivere un percorso triangolare attorno a dei piloni, considerevolmente distanti tra loro, il maggior numero di volte possibile, in uno spazio temporale di 30 minuti. Naturalmente per essere guidati sul pilone e per avere la certezza di averlo aggirato, ci si serve di un apparato GPS che, su un palmare, rende la posizione del modello rispetto al triangolo virtuale da percorrere. Non mi attardo sullo svolgimento della gara che ho presentato più volte sulla rivista Modellismo e sui forum, ma vorrei descrivere come ho allestito il mio ultimo modello dopo l’esperienza fatta in un paio di anni di gare.
Trovo queste gare bellissime anche sotto l’aspetto estetico, durante un round può capitare che una metà degli alianti in gara siano in volo simultaneamente, percorrano le stesse “strade” ideali e formino roccoli, nelle termiche ben formate. Gli alianti sono belli anche a terra, sono delle vere riproduzioni con gli interni ben curati. Bisogna anche dire che sono delle macchine abbastanza complesse per le molte superfici mobili e per le varie regolazioni ed assetti di volo.
Pur essendo un aliante riproduzione, non bisogna dimenticare che sono dei modelli da gara e per questo devono essere concepiti, pur lasciando per quanto possibile, intatta l’estetica e la fedeltà alla riproduzione.
Dopo l’esperienza fatta in gara ho avuto in mente, nella costruzione del mio nuovo Arcus: la semplicità e facilità di fare regolazioni ed eventuali riparazioni, sul campo, tra un round e l’altro.
L’Arcus è la riproduzione dell’omonimo aliante biposto di ultima generazione della Schempp-Hirth (www.schempp-hirth.com) e deve il nome al particolare disegno in pianta dell’ala che assomiglia appunto ad un “arco”. Il modello in scala 1:3, ha una apertura di 6.660 mm e i profili alari portati al 9% di spessore per una maggiore velocità/efficienza. Può imbarcare nelle ali quasi 5 litri di acqua per avere un range di carico alare tra 85 e 120 g/dm2. E’ costruito in tutta fibra (carbonio e vetro) dalla H-Model di Radim Horky (www.hmodell.cz) .
Il modello ha 4 superfici mobili per semiala, diruttori, rubinetti acqua, elevatore, profondità, sgancio, carrello e freno sul carrello, per un totale di 17 servocomandi da gestire con una radio (Futaba FX30) a 12 ch !!
Ho iniziato la costruzione dalle ali, controllando che i movimenti fossero fluidi e senza resistenze, lavorando un po’ di Dremel dove necessario. I servi li installo con grande cura utilizzando dei supporti in compensato fresato CNC della RCsolution (www.rcsolution.ch) che consentono di montare e smontare il servo con grande facilità. Anche i rinvii verso le parti mobili devono essere robusti, realizzati con materiale di prima qualità e la squadretta, con buona pace dell’estetica, l’ho realizzata con vetronite ben incollata all’interno della parte mobile. Con il programmatore dei servi ho provato i movimenti e centrato perfettamente lo zero. I coperchi in fibra dei pozzetti, li ho incollati con il silicone trasparente, per piccoli punti. Il montaggio è pulito e in caso di sostituzione del servo, con una trazione costante, si ottiene il distacco del silicone. Sul campo, eventualmente, si richiude fissando con nastro adesivo.
Si sistemano tutti i comandi senza lesinare sul tempo che è necessario per ottenere movimenti fluidi e senza incertezze. Fissati i cavi elettrici all’interno dell’ala con grumi di resina e addensante per evitare che i cavi si muovano. Le spinette dei servi sono assicurate legando femmina e maschio con del filo trecciato.
Sui diruttori faccio in modo che in posizione di chiusura, sulla squadretta del servo, il punto di cerniera (forcella) e perno di rotazione, siano allineati in chiusura. In questo modo quando il diruttore è chiuso non ci sono momenti sul servo e questo non assorbe corrente per tenere la posizione, faccio così per tutti i comandi che hanno posizioni fisse di chiusura (Carrello, Freno, Sgancio, Acqua).
Sul rubinetto dell’acqua si spalma della vasellina per assicurare la tenuta e ho fatto un foro sul coperchio del servo per ottenere eventualmente la fuoriuscita dell’acqua di una eventuale perdita (non si sa mai!) e ho anche isolato la spinetta dall’acqua con del termorestringente.
Ho curato le cerniere delle parti mobili ed ho applicato il mylar per chiudere le fessure.
Dalla semiala escono tre spinette tipo MPX, per un totale di 18 pin. Verso ala, le spine sono libere e numerate per evitare errori di montaggio.
Il lavoro sulla fusoliera inizia dal carrello. Purtroppo l’esperienza mi fa dire che questo è il punto delicato di ogni modello. Con i miei amici ci stupiamo ancora, come modelli perfetti e ben fatti, hanno dei carrelli, alle volte, veramente ridicoli come meccanica! Ci si stupisce ancora come ci si perda in un bicchiere d’acqua. Sono arrivato al punto che quando acquisto un nuovo aliante prima di tutto guardo come è fatto il carrello!! I migliori al momento sono i carrelli della FEMA e sull’Arcus c’è una specie di copia ma, come tutte le copie non è uguale (in peggio) all’originale. L’ho smontato e l’ho revisionato completamente per quanto si possa, cercando di ottenere il miglior movimento possibile. Non c’è niente di peggio in gara che vedere il carrello chiudersi in atterraggio, (a parte la perdita di punti) sportelli che volano via, cerniere strappate, ecc. Il carrello merita tutta la nostra attenzione. Si deve ottenere ovviamente il bloccaggio cinematico in apertura, per evitare che il colpo che riceve la ruota in atterraggio non si ripercuota sul servo, ma anche in chiusura il carrello deve essere bloccato, ovvero la forza centrifuga, nelle forti richiamate, non deve far pesare l’equipaggio mobile, sul servo. Non è infrequente vedere la ruota uscire anche di poco, dagli sportelli nelle forti richiamate. Questo è indice che la forza centrifuga ha superato la coppia del servo!
Nei movimenti a terra, trascinando il modello, ricordiamoci di tenere la radio accesa in modo che il servo del carrello sia alimentato, altrimenti rischiamo che con le vibrazioni e gli scossoni, il cinematismo esca dalla posizione di blocco e con il servo non alimentato… si chiuda, con sempre brutte conseguenze!
Bisogna dedicare ogni attenzione al carrello, non c’è niente di più frustrante di un carrello che ci pianta in piena gara.
Ho montato tra la ricevente ed il servo del carrello, un dispositivo elettronico della Emcotec: DPSI OCP, acronimo che sta per Over Current Protector. Come dice la sigla serve per evitare che un carrello che si incastra, bruci il servo o peggio dreni la corrente delle batterie (www.emcotec.de).
Si completa il lavoro con il freno ruota. Dalle foto si vede quanta attenzione ho dedicato a questo accessorio. Il freno è importante nelle gare GPS perché l’area di atterraggio e delimitata e il freno può essere determinate per non perdere punti. Ci sono dei bellissimi freni idraulici e a disco ma ancora non sono diffusi e sono rari. In questo modello il freno è ancora a strisciamento sulla ruota e sufficientemente efficace… quando la ruota non è bagnata! Il comando, con un buon servo, ha una molla a spirale, che assorbe le varie oscillazioni che la ruota comunica al freno. La regolazione del tiro deve essere semplice ed efficace, le foto descrivono bene la soluzione.
Sono passato quindi a sistemare il servo dello sgancio e l’ordinata sulla quale applicare la zavorra che sarà necessaria in fase di centraggio. Fatta l’ordinata in compensato da 4 mm, ben incollata in fusoliera, ho preparato la zavorra, uso sui miei modelli barrette di ottone pieno, 20x30 mm che taglio e rifinisco alla fresa e quindi ricavo i fori per il fissaggio tramite brugole, all’ordinata. Mi tengo scarso di peso in modo da fare il centraggio fine con i pesi (100-150 g) autoadesivi, del tipo usato dai gommisti.
Ho quindi iniziato a pensare all’impianto elettrico. Vi sono una marea di cavi elettrici da sistemare: servi per le ali, servi nella fusoliera, GPS, batterie, interruttori, ecc. Già vedevo tutti questi antiestetici cavi elettrici in giro per la fusoliera… fintanto non mi è venuta l’idea della “canalina” come si fa nell’impiantistica elettrica, naturalmente volevo fare una cosa da aliante e quindi me la sono realizzata in fibra di vetro con uno stampo. Detto fatto, ho realizzato una “omega” che ho incollato ai due lati della fusoliera e ho fatto passare i cavi all’interno. Le spinette MPX per le ali, le ho fissate su una basetta di vetronite, opportunamente forata per far passare i pin delle spinette e quindi ho fatto le saldature dei cavi, in questo modo spinette, vetronite e cavi sono bloccati e non è restato che incollare la basetta in vetronite sui raccordi alari.
Le batterie (LiPo 5.000 + 3.800 mAh) sono state montate con velcro su una piastra di vetronite da 3 mm fissata alla fusoliera con tre viti di nylon da 4 mm messe in modo che l’estrazione dell’intero pacco batterie sia il più agevole e facile possibile. E’ importante perché è bene non caricare le LiPo dentro la fusoliera! A questo punto la ricevente: ho optato per la Weatronic 2.4 GHz FHSS Dual Receiver 12-22 R. Ho scelto la Weatronic non perché non mi fidassi della mia Futaba, ma perché con 17 servi, la Weatronic mi ha semplificato l’allestimento interno consentendomi di programmare i servi accoppiati (diruttori, acqua, alettoni esterni) riducendo il numero di canali necessari. Su modelli come questo si sente la necessità di una radio con 16 canali ma comunque la Weatronic fornisce una soluzione valida ed inoltre gestisce le due batterie e l’interruttore elettronico. La spinta finale ad adottare Weatronic è poi stata la notizia, confermata in un incontro che ho avuto con questa Azienda alla Fiera di Friedrichschafen, sull’integrazione del GPS Skynavigator direttamente nel sistema trasmissione-ricezione. Questo darebbe un sistema di connessione al GPS molto più affidabile e semplice dell’attuale. Il trasmettitore integra un blue toot che dialoga con il palmare, in pratica tutto l’impianto GPS è costituito dal rilevatore GPS installato in fusoliera sotto la capottina, collegato elettricamente con la ricevente Weatronic e da un palmare nelle mani dell’aiutante, affidabile ed elegante.
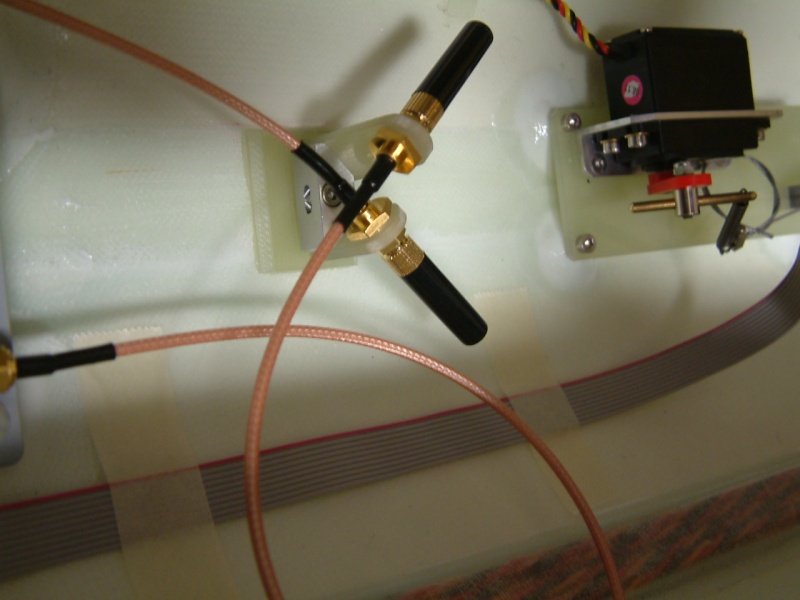
Infine una idea sulle antenne della ricevente: ho parlato con Konrad Schmieder (tecnico Weatronic) che mi ha spiegato come la posizione migliore per antenne 2,4 GHz, sia di posizionarle a 90° tra di loro, con la bisettrice in asse con il modello e meglio ancora se il piano formato tra le antenne è inclinato rispetto all’orizzontale. Tutto questo è stato trasferito sul modello come si vede in foto.
Ora non resta che collaudare l’Arcus, non mi aspetto sorprese dato che ho visto volare altri esemplari, ma mi attende una lunga messa a punto.
Infine una nota, se volete iniziare a gareggiare in GPS, non vi preoccupate molto del modello che avete o che vorreste comprare… l’abilità di pilotaggio e la tattica di gara è notevolmente più importante delle caratteristiche del modello! Se avete un sano modello in scala (meglio 1:3 ma vanno bene anche altre scale minori) unitevi a noi, sono gare bellissime, si vola tanto e le persone che si trovano sui campi di volo, sono davvero simpatiche e si fraternizza con semplicità.
Gianni Vetrini | |
| | | | Gianni Vetrini
Messaggi : 22
Data d'iscrizione : 30.12.10
Età : 76
Località : Città S. Angelo (Pe)
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Sab Gen 22, 2011 8:59 pm | |
| | |
| | | | Altoè Enry
Messaggi : 68
Data d'iscrizione : 21.04.10
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Lun Gen 24, 2011 2:30 pm | |
| - Gianni Vetrini ha scritto:
- Le gare per alianti in scala con assistenza del GPS, sono una realtà matura e si svolgono regolarmente in un circuito Europeo. Maggiori informazioni su www.gps-eurocup.ch, questo sito ha una sezione scritta in italiano ed è facilmente consultabile.
L’idea è nata quando ci si è posti la domanda di come organizzare delle gare per grandi alianti in scala, la risposta è stata la più semplice e naturale: farli gareggiare come gli alianti veri, ovvero descrivere un percorso triangolare attorno a dei piloni, considerevolmente distanti tra loro, il maggior numero di volte possibile, in uno spazio temporale di 30 minuti. Naturalmente per essere guidati sul pilone e per avere la certezza di averlo aggirato, ci si serve di un apparato GPS che, su un palmare, rende la posizione del modello rispetto al triangolo virtuale da percorrere. Non mi attardo sullo svolgimento della gara che ho presentato più volte sulla rivista Modellismo e sui forum, ma vorrei descrivere come ho allestito il mio ultimo modello dopo l’esperienza fatta in un paio di anni di gare.
Trovo queste gare bellissime anche sotto l’aspetto estetico, durante un round può capitare che una metà degli alianti in gara siano in volo simultaneamente, percorrano le stesse “strade” ideali e formino roccoli, nelle termiche ben formate. Gli alianti sono belli anche a terra, sono delle vere riproduzioni con gli interni ben curati. Bisogna anche dire che sono delle macchine abbastanza complesse per le molte superfici mobili e per le varie regolazioni ed assetti di volo.
Pur essendo un aliante riproduzione, non bisogna dimenticare che sono dei modelli da gara e per questo devono essere concepiti, pur lasciando per quanto possibile, intatta l’estetica e la fedeltà alla riproduzione.
Dopo l’esperienza fatta in gara ho avuto in mente, nella costruzione del mio nuovo Arcus: la semplicità e facilità di fare regolazioni ed eventuali riparazioni, sul campo, tra un round e l’altro.
L’Arcus è la riproduzione dell’omonimo aliante biposto di ultima generazione della Schempp-Hirth (www.schempp-hirth.com) e deve il nome al particolare disegno in pianta dell’ala che assomiglia appunto ad un “arco”. Il modello in scala 1:3, ha una apertura di 6.660 mm e i profili alari portati al 9% di spessore per una maggiore velocità/efficienza. Può imbarcare nelle ali quasi 5 litri di acqua per avere un range di carico alare tra 85 e 120 g/dm2. E’ costruito in tutta fibra (carbonio e vetro) dalla H-Model di Radim Horky (www.hmodell.cz) .
Il modello ha 4 superfici mobili per semiala, diruttori, rubinetti acqua, elevatore, profondità, sgancio, carrello e freno sul carrello, per un totale di 17 servocomandi da gestire con una radio (Futaba FX30) a 12 ch !!
Ho iniziato la costruzione dalle ali, controllando che i movimenti fossero fluidi e senza resistenze, lavorando un po’ di Dremel dove necessario. I servi li installo con grande cura utilizzando dei supporti in compensato fresato CNC della RCsolution (www.rcsolution.ch) che consentono di montare e smontare il servo con grande facilità. Anche i rinvii verso le parti mobili devono essere robusti, realizzati con materiale di prima qualità e la squadretta, con buona pace dell’estetica, l’ho realizzata con vetronite ben incollata all’interno della parte mobile. Con il programmatore dei servi ho provato i movimenti e centrato perfettamente lo zero. I coperchi in fibra dei pozzetti, li ho incollati con il silicone trasparente, per piccoli punti. Il montaggio è pulito e in caso di sostituzione del servo, con una trazione costante, si ottiene il distacco del silicone. Sul campo, eventualmente, si richiude fissando con nastro adesivo.
Si sistemano tutti i comandi senza lesinare sul tempo che è necessario per ottenere movimenti fluidi e senza incertezze. Fissati i cavi elettrici all’interno dell’ala con grumi di resina e addensante per evitare che i cavi si muovano. Le spinette dei servi sono assicurate legando femmina e maschio con del filo trecciato.
Sui diruttori faccio in modo che in posizione di chiusura, sulla squadretta del servo, il punto di cerniera (forcella) e perno di rotazione, siano allineati in chiusura. In questo modo quando il diruttore è chiuso non ci sono momenti sul servo e questo non assorbe corrente per tenere la posizione, faccio così per tutti i comandi che hanno posizioni fisse di chiusura (Carrello, Freno, Sgancio, Acqua).
Sul rubinetto dell’acqua si spalma della vasellina per assicurare la tenuta e ho fatto un foro sul coperchio del servo per ottenere eventualmente la fuoriuscita dell’acqua di una eventuale perdita (non si sa mai!) e ho anche isolato la spinetta dall’acqua con del termorestringente.
Ho curato le cerniere delle parti mobili ed ho applicato il mylar per chiudere le fessure.
Dalla semiala escono tre spinette tipo MPX, per un totale di 18 pin. Verso ala, le spine sono libere e numerate per evitare errori di montaggio.
Il lavoro sulla fusoliera inizia dal carrello. Purtroppo l’esperienza mi fa dire che questo è il punto delicato di ogni modello. Con i miei amici ci stupiamo ancora, come modelli perfetti e ben fatti, hanno dei carrelli, alle volte, veramente ridicoli come meccanica! Ci si stupisce ancora come ci si perda in un bicchiere d’acqua. Sono arrivato al punto che quando acquisto un nuovo aliante prima di tutto guardo come è fatto il carrello!! I migliori al momento sono i carrelli della FEMA e sull’Arcus c’è una specie di copia ma, come tutte le copie non è uguale (in peggio) all’originale. L’ho smontato e l’ho revisionato completamente per quanto si possa, cercando di ottenere il miglior movimento possibile. Non c’è niente di peggio in gara che vedere il carrello chiudersi in atterraggio, (a parte la perdita di punti) sportelli che volano via, cerniere strappate, ecc. Il carrello merita tutta la nostra attenzione. Si deve ottenere ovviamente il bloccaggio cinematico in apertura, per evitare che il colpo che riceve la ruota in atterraggio non si ripercuota sul servo, ma anche in chiusura il carrello deve essere bloccato, ovvero la forza centrifuga, nelle forti richiamate, non deve far pesare l’equipaggio mobile, sul servo. Non è infrequente vedere la ruota uscire anche di poco, dagli sportelli nelle forti richiamate. Questo è indice che la forza centrifuga ha superato la coppia del servo!
Nei movimenti a terra, trascinando il modello, ricordiamoci di tenere la radio accesa in modo che il servo del carrello sia alimentato, altrimenti rischiamo che con le vibrazioni e gli scossoni, il cinematismo esca dalla posizione di blocco e con il servo non alimentato… si chiuda, con sempre brutte conseguenze!
Bisogna dedicare ogni attenzione al carrello, non c’è niente di più frustrante di un carrello che ci pianta in piena gara.
Ho montato tra la ricevente ed il servo del carrello, un dispositivo elettronico della Emcotec: DPSI OCP, acronimo che sta per Over Current Protector. Come dice la sigla serve per evitare che un carrello che si incastra, bruci il servo o peggio dreni la corrente delle batterie (www.emcotec.de).
Si completa il lavoro con il freno ruota. Dalle foto si vede quanta attenzione ho dedicato a questo accessorio. Il freno è importante nelle gare GPS perché l’area di atterraggio e delimitata e il freno può essere determinate per non perdere punti. Ci sono dei bellissimi freni idraulici e a disco ma ancora non sono diffusi e sono rari. In questo modello il freno è ancora a strisciamento sulla ruota e sufficientemente efficace… quando la ruota non è bagnata! Il comando, con un buon servo, ha una molla a spirale, che assorbe le varie oscillazioni che la ruota comunica al freno. La regolazione del tiro deve essere semplice ed efficace, le foto descrivono bene la soluzione.
Sono passato quindi a sistemare il servo dello sgancio e l’ordinata sulla quale applicare la zavorra che sarà necessaria in fase di centraggio. Fatta l’ordinata in compensato da 4 mm, ben incollata in fusoliera, ho preparato la zavorra, uso sui miei modelli barrette di ottone pieno, 20x30 mm che taglio e rifinisco alla fresa e quindi ricavo i fori per il fissaggio tramite brugole, all’ordinata. Mi tengo scarso di peso in modo da fare il centraggio fine con i pesi (100-150 g) autoadesivi, del tipo usato dai gommisti.
Ho quindi iniziato a pensare all’impianto elettrico. Vi sono una marea di cavi elettrici da sistemare: servi per le ali, servi nella fusoliera, GPS, batterie, interruttori, ecc. Già vedevo tutti questi antiestetici cavi elettrici in giro per la fusoliera… fintanto non mi è venuta l’idea della “canalina” come si fa nell’impiantistica elettrica, naturalmente volevo fare una cosa da aliante e quindi me la sono realizzata in fibra di vetro con uno stampo. Detto fatto, ho realizzato una “omega” che ho incollato ai due lati della fusoliera e ho fatto passare i cavi all’interno. Le spinette MPX per le ali, le ho fissate su una basetta di vetronite, opportunamente forata per far passare i pin delle spinette e quindi ho fatto le saldature dei cavi, in questo modo spinette, vetronite e cavi sono bloccati e non è restato che incollare la basetta in vetronite sui raccordi alari.
Le batterie (LiPo 5.000 + 3.800 mAh) sono state montate con velcro su una piastra di vetronite da 3 mm fissata alla fusoliera con tre viti di nylon da 4 mm messe in modo che l’estrazione dell’intero pacco batterie sia il più agevole e facile possibile. E’ importante perché è bene non caricare le LiPo dentro la fusoliera! A questo punto la ricevente: ho optato per la Weatronic 2.4 GHz FHSS Dual Receiver 12-22 R. Ho scelto la Weatronic non perché non mi fidassi della mia Futaba, ma perché con 17 servi, la Weatronic mi ha semplificato l’allestimento interno consentendomi di programmare i servi accoppiati (diruttori, acqua, alettoni esterni) riducendo il numero di canali necessari. Su modelli come questo si sente la necessità di una radio con 16 canali ma comunque la Weatronic fornisce una soluzione valida ed inoltre gestisce le due batterie e l’interruttore elettronico. La spinta finale ad adottare Weatronic è poi stata la notizia, confermata in un incontro che ho avuto con questa Azienda alla Fiera di Friedrichschafen, sull’integrazione del GPS Skynavigator direttamente nel sistema trasmissione-ricezione. Questo darebbe un sistema di connessione al GPS molto più affidabile e semplice dell’attuale. Il trasmettitore integra un blue toot che dialoga con il palmare, in pratica tutto l’impianto GPS è costituito dal rilevatore GPS installato in fusoliera sotto la capottina, collegato elettricamente con la ricevente Weatronic e da un palmare nelle mani dell’aiutante, affidabile ed elegante.
Infine una idea sulle antenne della ricevente: ho parlato con Konrad Schmieder (tecnico Weatronic) che mi ha spiegato come la posizione migliore per antenne 2,4 GHz, sia di posizionarle a 90° tra di loro, con la bisettrice in asse con il modello e meglio ancora se il piano formato tra le antenne è inclinato rispetto all’orizzontale. Tutto questo è stato trasferito sul modello come si vede in foto.
Ora non resta che collaudare l’Arcus, non mi aspetto sorprese dato che ho visto volare altri esemplari, ma mi attende una lunga messa a punto.
Infine una nota, se volete iniziare a gareggiare in GPS, non vi preoccupate molto del modello che avete o che vorreste comprare… l’abilità di pilotaggio e la tattica di gara è notevolmente più importante delle caratteristiche del modello! Se avete un sano modello in scala (meglio 1:3 ma vanno bene anche altre scale minori) unitevi a noi, sono gare bellissime, si vola tanto e le persone che si trovano sui campi di volo, sono davvero simpatiche e si fraternizza con semplicità.
Gianni Vetrini Caro Gianni, come sempre, intervento chiaro ed interessante! Ciao. Enry | |
| | | | Altoè Enry
Messaggi : 68
Data d'iscrizione : 21.04.10
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Mar Gen 25, 2011 4:24 pm | |
| - Gianni Vetrini ha scritto:
- Le gare per alianti in scala con assistenza del GPS, sono una realtà matura e si svolgono regolarmente in un circuito Europeo. Maggiori informazioni su www.gps-eurocup.ch, questo sito ha una sezione scritta in italiano ed è facilmente consultabile.
L’idea è nata quando ci si è posti la domanda di come organizzare delle gare per grandi alianti in scala, la risposta è stata la più semplice e naturale: farli gareggiare come gli alianti veri, ovvero descrivere un percorso triangolare attorno a dei piloni, considerevolmente distanti tra loro, il maggior numero di volte possibile, in uno spazio temporale di 30 minuti. Naturalmente per essere guidati sul pilone e per avere la certezza di averlo aggirato, ci si serve di un apparato GPS che, su un palmare, rende la posizione del modello rispetto al triangolo virtuale da percorrere. Non mi attardo sullo svolgimento della gara che ho presentato più volte sulla rivista Modellismo e sui forum, ma vorrei descrivere come ho allestito il mio ultimo modello dopo l’esperienza fatta in un paio di anni di gare.
Trovo queste gare bellissime anche sotto l’aspetto estetico, durante un round può capitare che una metà degli alianti in gara siano in volo simultaneamente, percorrano le stesse “strade” ideali e formino roccoli, nelle termiche ben formate. Gli alianti sono belli anche a terra, sono delle vere riproduzioni con gli interni ben curati. Bisogna anche dire che sono delle macchine abbastanza complesse per le molte superfici mobili e per le varie regolazioni ed assetti di volo.
Pur essendo un aliante riproduzione, non bisogna dimenticare che sono dei modelli da gara e per questo devono essere concepiti, pur lasciando per quanto possibile, intatta l’estetica e la fedeltà alla riproduzione.
Dopo l’esperienza fatta in gara ho avuto in mente, nella costruzione del mio nuovo Arcus: la semplicità e facilità di fare regolazioni ed eventuali riparazioni, sul campo, tra un round e l’altro.
L’Arcus è la riproduzione dell’omonimo aliante biposto di ultima generazione della Schempp-Hirth (www.schempp-hirth.com) e deve il nome al particolare disegno in pianta dell’ala che assomiglia appunto ad un “arco”. Il modello in scala 1:3, ha una apertura di 6.660 mm e i profili alari portati al 9% di spessore per una maggiore velocità/efficienza. Può imbarcare nelle ali quasi 5 litri di acqua per avere un range di carico alare tra 85 e 120 g/dm2. E’ costruito in tutta fibra (carbonio e vetro) dalla H-Model di Radim Horky (www.hmodell.cz) .
Il modello ha 4 superfici mobili per semiala, diruttori, rubinetti acqua, elevatore, profondità, sgancio, carrello e freno sul carrello, per un totale di 17 servocomandi da gestire con una radio (Futaba FX30) a 12 ch !!
Ho iniziato la costruzione dalle ali, controllando che i movimenti fossero fluidi e senza resistenze, lavorando un po’ di Dremel dove necessario. I servi li installo con grande cura utilizzando dei supporti in compensato fresato CNC della RCsolution (www.rcsolution.ch) che consentono di montare e smontare il servo con grande facilità. Anche i rinvii verso le parti mobili devono essere robusti, realizzati con materiale di prima qualità e la squadretta, con buona pace dell’estetica, l’ho realizzata con vetronite ben incollata all’interno della parte mobile. Con il programmatore dei servi ho provato i movimenti e centrato perfettamente lo zero. I coperchi in fibra dei pozzetti, li ho incollati con il silicone trasparente, per piccoli punti. Il montaggio è pulito e in caso di sostituzione del servo, con una trazione costante, si ottiene il distacco del silicone. Sul campo, eventualmente, si richiude fissando con nastro adesivo.
Si sistemano tutti i comandi senza lesinare sul tempo che è necessario per ottenere movimenti fluidi e senza incertezze. Fissati i cavi elettrici all’interno dell’ala con grumi di resina e addensante per evitare che i cavi si muovano. Le spinette dei servi sono assicurate legando femmina e maschio con del filo trecciato.
Sui diruttori faccio in modo che in posizione di chiusura, sulla squadretta del servo, il punto di cerniera (forcella) e perno di rotazione, siano allineati in chiusura. In questo modo quando il diruttore è chiuso non ci sono momenti sul servo e questo non assorbe corrente per tenere la posizione, faccio così per tutti i comandi che hanno posizioni fisse di chiusura (Carrello, Freno, Sgancio, Acqua).
Sul rubinetto dell’acqua si spalma della vasellina per assicurare la tenuta e ho fatto un foro sul coperchio del servo per ottenere eventualmente la fuoriuscita dell’acqua di una eventuale perdita (non si sa mai!) e ho anche isolato la spinetta dall’acqua con del termorestringente.
Ho curato le cerniere delle parti mobili ed ho applicato il mylar per chiudere le fessure.
Dalla semiala escono tre spinette tipo MPX, per un totale di 18 pin. Verso ala, le spine sono libere e numerate per evitare errori di montaggio.
Il lavoro sulla fusoliera inizia dal carrello. Purtroppo l’esperienza mi fa dire che questo è il punto delicato di ogni modello. Con i miei amici ci stupiamo ancora, come modelli perfetti e ben fatti, hanno dei carrelli, alle volte, veramente ridicoli come meccanica! Ci si stupisce ancora come ci si perda in un bicchiere d’acqua. Sono arrivato al punto che quando acquisto un nuovo aliante prima di tutto guardo come è fatto il carrello!! I migliori al momento sono i carrelli della FEMA e sull’Arcus c’è una specie di copia ma, come tutte le copie non è uguale (in peggio) all’originale. L’ho smontato e l’ho revisionato completamente per quanto si possa, cercando di ottenere il miglior movimento possibile. Non c’è niente di peggio in gara che vedere il carrello chiudersi in atterraggio, (a parte la perdita di punti) sportelli che volano via, cerniere strappate, ecc. Il carrello merita tutta la nostra attenzione. Si deve ottenere ovviamente il bloccaggio cinematico in apertura, per evitare che il colpo che riceve la ruota in atterraggio non si ripercuota sul servo, ma anche in chiusura il carrello deve essere bloccato, ovvero la forza centrifuga, nelle forti richiamate, non deve far pesare l’equipaggio mobile, sul servo. Non è infrequente vedere la ruota uscire anche di poco, dagli sportelli nelle forti richiamate. Questo è indice che la forza centrifuga ha superato la coppia del servo!
Nei movimenti a terra, trascinando il modello, ricordiamoci di tenere la radio accesa in modo che il servo del carrello sia alimentato, altrimenti rischiamo che con le vibrazioni e gli scossoni, il cinematismo esca dalla posizione di blocco e con il servo non alimentato… si chiuda, con sempre brutte conseguenze!
Bisogna dedicare ogni attenzione al carrello, non c’è niente di più frustrante di un carrello che ci pianta in piena gara.
Ho montato tra la ricevente ed il servo del carrello, un dispositivo elettronico della Emcotec: DPSI OCP, acronimo che sta per Over Current Protector. Come dice la sigla serve per evitare che un carrello che si incastra, bruci il servo o peggio dreni la corrente delle batterie (www.emcotec.de).
Si completa il lavoro con il freno ruota. Dalle foto si vede quanta attenzione ho dedicato a questo accessorio. Il freno è importante nelle gare GPS perché l’area di atterraggio e delimitata e il freno può essere determinate per non perdere punti. Ci sono dei bellissimi freni idraulici e a disco ma ancora non sono diffusi e sono rari. In questo modello il freno è ancora a strisciamento sulla ruota e sufficientemente efficace… quando la ruota non è bagnata! Il comando, con un buon servo, ha una molla a spirale, che assorbe le varie oscillazioni che la ruota comunica al freno. La regolazione del tiro deve essere semplice ed efficace, le foto descrivono bene la soluzione.
Sono passato quindi a sistemare il servo dello sgancio e l’ordinata sulla quale applicare la zavorra che sarà necessaria in fase di centraggio. Fatta l’ordinata in compensato da 4 mm, ben incollata in fusoliera, ho preparato la zavorra, uso sui miei modelli barrette di ottone pieno, 20x30 mm che taglio e rifinisco alla fresa e quindi ricavo i fori per il fissaggio tramite brugole, all’ordinata. Mi tengo scarso di peso in modo da fare il centraggio fine con i pesi (100-150 g) autoadesivi, del tipo usato dai gommisti.
Ho quindi iniziato a pensare all’impianto elettrico. Vi sono una marea di cavi elettrici da sistemare: servi per le ali, servi nella fusoliera, GPS, batterie, interruttori, ecc. Già vedevo tutti questi antiestetici cavi elettrici in giro per la fusoliera… fintanto non mi è venuta l’idea della “canalina” come si fa nell’impiantistica elettrica, naturalmente volevo fare una cosa da aliante e quindi me la sono realizzata in fibra di vetro con uno stampo. Detto fatto, ho realizzato una “omega” che ho incollato ai due lati della fusoliera e ho fatto passare i cavi all’interno. Le spinette MPX per le ali, le ho fissate su una basetta di vetronite, opportunamente forata per far passare i pin delle spinette e quindi ho fatto le saldature dei cavi, in questo modo spinette, vetronite e cavi sono bloccati e non è restato che incollare la basetta in vetronite sui raccordi alari.
Le batterie (LiPo 5.000 + 3.800 mAh) sono state montate con velcro su una piastra di vetronite da 3 mm fissata alla fusoliera con tre viti di nylon da 4 mm messe in modo che l’estrazione dell’intero pacco batterie sia il più agevole e facile possibile. E’ importante perché è bene non caricare le LiPo dentro la fusoliera! A questo punto la ricevente: ho optato per la Weatronic 2.4 GHz FHSS Dual Receiver 12-22 R. Ho scelto la Weatronic non perché non mi fidassi della mia Futaba, ma perché con 17 servi, la Weatronic mi ha semplificato l’allestimento interno consentendomi di programmare i servi accoppiati (diruttori, acqua, alettoni esterni) riducendo il numero di canali necessari. Su modelli come questo si sente la necessità di una radio con 16 canali ma comunque la Weatronic fornisce una soluzione valida ed inoltre gestisce le due batterie e l’interruttore elettronico. La spinta finale ad adottare Weatronic è poi stata la notizia, confermata in un incontro che ho avuto con questa Azienda alla Fiera di Friedrichschafen, sull’integrazione del GPS Skynavigator direttamente nel sistema trasmissione-ricezione. Questo darebbe un sistema di connessione al GPS molto più affidabile e semplice dell’attuale. Il trasmettitore integra un blue toot che dialoga con il palmare, in pratica tutto l’impianto GPS è costituito dal rilevatore GPS installato in fusoliera sotto la capottina, collegato elettricamente con la ricevente Weatronic e da un palmare nelle mani dell’aiutante, affidabile ed elegante.
Infine una idea sulle antenne della ricevente: ho parlato con Konrad Schmieder (tecnico Weatronic) che mi ha spiegato come la posizione migliore per antenne 2,4 GHz, sia di posizionarle a 90° tra di loro, con la bisettrice in asse con il modello e meglio ancora se il piano formato tra le antenne è inclinato rispetto all’orizzontale. Tutto questo è stato trasferito sul modello come si vede in foto.
Ora non resta che collaudare l’Arcus, non mi aspetto sorprese dato che ho visto volare altri esemplari, ma mi attende una lunga messa a punto.
Infine una nota, se volete iniziare a gareggiare in GPS, non vi preoccupate molto del modello che avete o che vorreste comprare… l’abilità di pilotaggio e la tattica di gara è notevolmente più importante delle caratteristiche del modello! Se avete un sano modello in scala (meglio 1:3 ma vanno bene anche altre scale minori) unitevi a noi, sono gare bellissime, si vola tanto e le persone che si trovano sui campi di volo, sono davvero simpatiche e si fraternizza con semplicità.
Gianni Vetrini .. dimenticavo: perchè non posti anche gli articoli da te scritti e pubblicati su Modellismo? Ciao. Enry | |
| | | | mfgbruneck

Messaggi : 145
Data d'iscrizione : 12.11.09
Età : 47
Località : Brunico
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Mar Feb 01, 2011 5:10 pm | |
| - Gianni Vetrini ha scritto:
Gianni Vetrini ancora Foto e info....  | |
| | | | Altoè Enry
Messaggi : 68
Data d'iscrizione : 21.04.10
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Mer Feb 02, 2011 9:57 am | |
| - Gianni Vetrini ha scritto:
- Le gare per alianti in scala con assistenza del GPS, sono una realtà matura e si svolgono regolarmente in un circuito Europeo. Maggiori informazioni su www.gps-eurocup.ch, questo sito ha una sezione scritta in italiano ed è facilmente consultabile.
L’idea è nata quando ci si è posti la domanda di come organizzare delle gare per grandi alianti in scala, la risposta è stata la più semplice e naturale: farli gareggiare come gli alianti veri, ovvero descrivere un percorso triangolare attorno a dei piloni, considerevolmente distanti tra loro, il maggior numero di volte possibile, in uno spazio temporale di 30 minuti. Naturalmente per essere guidati sul pilone e per avere la certezza di averlo aggirato, ci si serve di un apparato GPS che, su un palmare, rende la posizione del modello rispetto al triangolo virtuale da percorrere. Non mi attardo sullo svolgimento della gara che ho presentato più volte sulla rivista Modellismo e sui forum, ma vorrei descrivere come ho allestito il mio ultimo modello dopo l’esperienza fatta in un paio di anni di gare.
Trovo queste gare bellissime anche sotto l’aspetto estetico, durante un round può capitare che una metà degli alianti in gara siano in volo simultaneamente, percorrano le stesse “strade” ideali e formino roccoli, nelle termiche ben formate. Gli alianti sono belli anche a terra, sono delle vere riproduzioni con gli interni ben curati. Bisogna anche dire che sono delle macchine abbastanza complesse per le molte superfici mobili e per le varie regolazioni ed assetti di volo.
Pur essendo un aliante riproduzione, non bisogna dimenticare che sono dei modelli da gara e per questo devono essere concepiti, pur lasciando per quanto possibile, intatta l’estetica e la fedeltà alla riproduzione.
Dopo l’esperienza fatta in gara ho avuto in mente, nella costruzione del mio nuovo Arcus: la semplicità e facilità di fare regolazioni ed eventuali riparazioni, sul campo, tra un round e l’altro.
L’Arcus è la riproduzione dell’omonimo aliante biposto di ultima generazione della Schempp-Hirth (www.schempp-hirth.com) e deve il nome al particolare disegno in pianta dell’ala che assomiglia appunto ad un “arco”. Il modello in scala 1:3, ha una apertura di 6.660 mm e i profili alari portati al 9% di spessore per una maggiore velocità/efficienza. Può imbarcare nelle ali quasi 5 litri di acqua per avere un range di carico alare tra 85 e 120 g/dm2. E’ costruito in tutta fibra (carbonio e vetro) dalla H-Model di Radim Horky (www.hmodell.cz) .
Il modello ha 4 superfici mobili per semiala, diruttori, rubinetti acqua, elevatore, profondità, sgancio, carrello e freno sul carrello, per un totale di 17 servocomandi da gestire con una radio (Futaba FX30) a 12 ch !!
Ho iniziato la costruzione dalle ali, controllando che i movimenti fossero fluidi e senza resistenze, lavorando un po’ di Dremel dove necessario. I servi li installo con grande cura utilizzando dei supporti in compensato fresato CNC della RCsolution (www.rcsolution.ch) che consentono di montare e smontare il servo con grande facilità. Anche i rinvii verso le parti mobili devono essere robusti, realizzati con materiale di prima qualità e la squadretta, con buona pace dell’estetica, l’ho realizzata con vetronite ben incollata all’interno della parte mobile. Con il programmatore dei servi ho provato i movimenti e centrato perfettamente lo zero. I coperchi in fibra dei pozzetti, li ho incollati con il silicone trasparente, per piccoli punti. Il montaggio è pulito e in caso di sostituzione del servo, con una trazione costante, si ottiene il distacco del silicone. Sul campo, eventualmente, si richiude fissando con nastro adesivo.
Si sistemano tutti i comandi senza lesinare sul tempo che è necessario per ottenere movimenti fluidi e senza incertezze. Fissati i cavi elettrici all’interno dell’ala con grumi di resina e addensante per evitare che i cavi si muovano. Le spinette dei servi sono assicurate legando femmina e maschio con del filo trecciato.
Sui diruttori faccio in modo che in posizione di chiusura, sulla squadretta del servo, il punto di cerniera (forcella) e perno di rotazione, siano allineati in chiusura. In questo modo quando il diruttore è chiuso non ci sono momenti sul servo e questo non assorbe corrente per tenere la posizione, faccio così per tutti i comandi che hanno posizioni fisse di chiusura (Carrello, Freno, Sgancio, Acqua).
Sul rubinetto dell’acqua si spalma della vasellina per assicurare la tenuta e ho fatto un foro sul coperchio del servo per ottenere eventualmente la fuoriuscita dell’acqua di una eventuale perdita (non si sa mai!) e ho anche isolato la spinetta dall’acqua con del termorestringente.
Ho curato le cerniere delle parti mobili ed ho applicato il mylar per chiudere le fessure.
Dalla semiala escono tre spinette tipo MPX, per un totale di 18 pin. Verso ala, le spine sono libere e numerate per evitare errori di montaggio.
Il lavoro sulla fusoliera inizia dal carrello. Purtroppo l’esperienza mi fa dire che questo è il punto delicato di ogni modello. Con i miei amici ci stupiamo ancora, come modelli perfetti e ben fatti, hanno dei carrelli, alle volte, veramente ridicoli come meccanica! Ci si stupisce ancora come ci si perda in un bicchiere d’acqua. Sono arrivato al punto che quando acquisto un nuovo aliante prima di tutto guardo come è fatto il carrello!! I migliori al momento sono i carrelli della FEMA e sull’Arcus c’è una specie di copia ma, come tutte le copie non è uguale (in peggio) all’originale. L’ho smontato e l’ho revisionato completamente per quanto si possa, cercando di ottenere il miglior movimento possibile. Non c’è niente di peggio in gara che vedere il carrello chiudersi in atterraggio, (a parte la perdita di punti) sportelli che volano via, cerniere strappate, ecc. Il carrello merita tutta la nostra attenzione. Si deve ottenere ovviamente il bloccaggio cinematico in apertura, per evitare che il colpo che riceve la ruota in atterraggio non si ripercuota sul servo, ma anche in chiusura il carrello deve essere bloccato, ovvero la forza centrifuga, nelle forti richiamate, non deve far pesare l’equipaggio mobile, sul servo. Non è infrequente vedere la ruota uscire anche di poco, dagli sportelli nelle forti richiamate. Questo è indice che la forza centrifuga ha superato la coppia del servo!
Nei movimenti a terra, trascinando il modello, ricordiamoci di tenere la radio accesa in modo che il servo del carrello sia alimentato, altrimenti rischiamo che con le vibrazioni e gli scossoni, il cinematismo esca dalla posizione di blocco e con il servo non alimentato… si chiuda, con sempre brutte conseguenze!
Bisogna dedicare ogni attenzione al carrello, non c’è niente di più frustrante di un carrello che ci pianta in piena gara.
Ho montato tra la ricevente ed il servo del carrello, un dispositivo elettronico della Emcotec: DPSI OCP, acronimo che sta per Over Current Protector. Come dice la sigla serve per evitare che un carrello che si incastra, bruci il servo o peggio dreni la corrente delle batterie (www.emcotec.de).
Si completa il lavoro con il freno ruota. Dalle foto si vede quanta attenzione ho dedicato a questo accessorio. Il freno è importante nelle gare GPS perché l’area di atterraggio e delimitata e il freno può essere determinate per non perdere punti. Ci sono dei bellissimi freni idraulici e a disco ma ancora non sono diffusi e sono rari. In questo modello il freno è ancora a strisciamento sulla ruota e sufficientemente efficace… quando la ruota non è bagnata! Il comando, con un buon servo, ha una molla a spirale, che assorbe le varie oscillazioni che la ruota comunica al freno. La regolazione del tiro deve essere semplice ed efficace, le foto descrivono bene la soluzione.
Sono passato quindi a sistemare il servo dello sgancio e l’ordinata sulla quale applicare la zavorra che sarà necessaria in fase di centraggio. Fatta l’ordinata in compensato da 4 mm, ben incollata in fusoliera, ho preparato la zavorra, uso sui miei modelli barrette di ottone pieno, 20x30 mm che taglio e rifinisco alla fresa e quindi ricavo i fori per il fissaggio tramite brugole, all’ordinata. Mi tengo scarso di peso in modo da fare il centraggio fine con i pesi (100-150 g) autoadesivi, del tipo usato dai gommisti.
Ho quindi iniziato a pensare all’impianto elettrico. Vi sono una marea di cavi elettrici da sistemare: servi per le ali, servi nella fusoliera, GPS, batterie, interruttori, ecc. Già vedevo tutti questi antiestetici cavi elettrici in giro per la fusoliera… fintanto non mi è venuta l’idea della “canalina” come si fa nell’impiantistica elettrica, naturalmente volevo fare una cosa da aliante e quindi me la sono realizzata in fibra di vetro con uno stampo. Detto fatto, ho realizzato una “omega” che ho incollato ai due lati della fusoliera e ho fatto passare i cavi all’interno. Le spinette MPX per le ali, le ho fissate su una basetta di vetronite, opportunamente forata per far passare i pin delle spinette e quindi ho fatto le saldature dei cavi, in questo modo spinette, vetronite e cavi sono bloccati e non è restato che incollare la basetta in vetronite sui raccordi alari.
Le batterie (LiPo 5.000 + 3.800 mAh) sono state montate con velcro su una piastra di vetronite da 3 mm fissata alla fusoliera con tre viti di nylon da 4 mm messe in modo che l’estrazione dell’intero pacco batterie sia il più agevole e facile possibile. E’ importante perché è bene non caricare le LiPo dentro la fusoliera! A questo punto la ricevente: ho optato per la Weatronic 2.4 GHz FHSS Dual Receiver 12-22 R. Ho scelto la Weatronic non perché non mi fidassi della mia Futaba, ma perché con 17 servi, la Weatronic mi ha semplificato l’allestimento interno consentendomi di programmare i servi accoppiati (diruttori, acqua, alettoni esterni) riducendo il numero di canali necessari. Su modelli come questo si sente la necessità di una radio con 16 canali ma comunque la Weatronic fornisce una soluzione valida ed inoltre gestisce le due batterie e l’interruttore elettronico. La spinta finale ad adottare Weatronic è poi stata la notizia, confermata in un incontro che ho avuto con questa Azienda alla Fiera di Friedrichschafen, sull’integrazione del GPS Skynavigator direttamente nel sistema trasmissione-ricezione. Questo darebbe un sistema di connessione al GPS molto più affidabile e semplice dell’attuale. Il trasmettitore integra un blue toot che dialoga con il palmare, in pratica tutto l’impianto GPS è costituito dal rilevatore GPS installato in fusoliera sotto la capottina, collegato elettricamente con la ricevente Weatronic e da un palmare nelle mani dell’aiutante, affidabile ed elegante.
Infine una idea sulle antenne della ricevente: ho parlato con Konrad Schmieder (tecnico Weatronic) che mi ha spiegato come la posizione migliore per antenne 2,4 GHz, sia di posizionarle a 90° tra di loro, con la bisettrice in asse con il modello e meglio ancora se il piano formato tra le antenne è inclinato rispetto all’orizzontale. Tutto questo è stato trasferito sul modello come si vede in foto.
Ora non resta che collaudare l’Arcus, non mi aspetto sorprese dato che ho visto volare altri esemplari, ma mi attende una lunga messa a punto.
Infine una nota, se volete iniziare a gareggiare in GPS, non vi preoccupate molto del modello che avete o che vorreste comprare… l’abilità di pilotaggio e la tattica di gara è notevolmente più importante delle caratteristiche del modello! Se avete un sano modello in scala (meglio 1:3 ma vanno bene anche altre scale minori) unitevi a noi, sono gare bellissime, si vola tanto e le persone che si trovano sui campi di volo, sono davvero simpatiche e si fraternizza con semplicità.
Gianni Vetrini .....impressioni a freddo dopo l'avvenuto felice collaudo? Enry | |
| | | | Gianni Vetrini
Messaggi : 22
Data d'iscrizione : 30.12.10
Età : 76
Località : Città S. Angelo (Pe)
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Dom Feb 06, 2011 6:58 pm | |
|
.....impressioni a freddo dopo l'avvenuto felice collaudo?
Enry[/quote]
Caro Enry,
scusa la tarda risposta ma solo oggi (domenica) ho dato uno sguardo al sito dei Barbieri.
Vi ringrazio molto per l'accoglienza a Nervesa e per il collaudo, le mie impressioni: come sempre un modello non da il meglio di se appena uscito dal laboratorio.
Le sensazioni a caldo (e nelle elucubrazioni nel lungo viaggio di ritorno!), viaggia seduto nonostante il baricentro di default l'ho messo gia' un po' piu' indietro di quanto indicato dalla H-Model, diciamo 3-4 mm. La prova di affondata non mi piace ancora, inoltre e' lento, piu' lento dei miei altri modelli.
Quindi tornato a casa ho misurato il calettamento (1,4 gradi) poi ho tolto ancora del piombo dal muso, oltre 100 g. Bisogna provare ancora e ancora. Adesso capisco anche perche' Ueli (Nyffenegger = TUN) vola sempre con un paio di litri nelle ali! Non ho provato grandi termiche (spirali strette) ma la manovrabilita' mi sembra molto buona nonostante le dimensioni.
So che il modello ti interessa e quindi ti tengo aggiornato sugli sviluppi.
Ciao
Gianni
| |
| | | | DanieleP

Messaggi : 53
Data d'iscrizione : 24.10.09
Età : 62
Località : Castelfranco Vto.
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Dom Feb 06, 2011 7:58 pm | |
| - Gianni Vetrini ha scritto:
Infine una idea sulle antenne della ricevente: ho parlato con Konrad Schmieder (tecnico Weatronic) che mi ha spiegato come la posizione migliore per antenne 2,4 GHz, sia di posizionarle a 90° tra di loro, con la bisettrice in asse con il modello e meglio ancora se il piano formato tra le antenne è inclinato rispetto all’orizzontale. Tutto questo è stato trasferito sul modello come si vede in foto.
Gianni Vetrini Come mai hai utilizzato due antenne esterne e non hai utilizzato le due a corredo della centralina? Daniele Polo | |
| | | | Gianni Vetrini
Messaggi : 22
Data d'iscrizione : 30.12.10
Età : 76
Località : Città S. Angelo (Pe)
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Lun Feb 07, 2011 6:57 am | |
| - DanieleP ha scritto:
- Gianni Vetrini ha scritto:
Infine una idea sulle antenne della ricevente: ho parlato con Konrad Schmieder (tecnico Weatronic) che mi ha spiegato come la posizione migliore per antenne 2,4 GHz, sia di posizionarle a 90° tra di loro, con la bisettrice in asse con il modello e meglio ancora se il piano formato tra le antenne è inclinato rispetto all’orizzontale. Tutto questo è stato trasferito sul modello come si vede in foto.
Gianni Vetrini
Come mai hai utilizzato due antenne esterne e non hai utilizzato le due a corredo della centralina?
Daniele Polo Caro Daniele, è stato un suggerimento che mi hanno dato nella visita alla Weatronic. Discende da questo: mi hanno fatto vedere come cambia la qualità della ricezione producendo una piega nei terminalini delle antenne, quindi i terminali debbono essere protetti da movimenti maldesti nella fusoliera, andrebbe benissimo inserirli in due tubetti in plastica fissati da qualche parte. Mi hanno fatto vedere la loro soluzione da "esterno", la trovo pulita, avevo spazio... e quindi... Non c'è nessun motivo tecnico specifico. Ciao Gianni | |
| | | | DanieleP
Messaggi : 53
Data d'iscrizione : 24.10.09
Età : 62
Località : Castelfranco Vto.
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Lun Feb 07, 2011 7:22 am | |
| Grazie Gianni
pensavo che avendo parlato con i tecnici della Weatronic ti avessero detto che
le antenne da esterno hanno un guadagno superiore alle antennine a filo.
Siccome stò convertendo il mio Ventus 1:3 ed un F 86 a turbina mi interessava in modo particolare la cosa.
Daniele | |
| | | | Gianni Vetrini
Messaggi : 22
Data d'iscrizione : 30.12.10
Età : 76
Località : Città S. Angelo (Pe)
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Lun Feb 07, 2011 7:31 am | |
| - DanieleP ha scritto:
- Grazie Gianni
pensavo che avendo parlato con i tecnici della Weatronic ti avessero detto che
le antenne da esterno hanno un guadagno superiore alle antennine a filo.
Siccome stò convertendo il mio Ventus 1:3 ed un F 86 a turbina mi interessava in modo particolare la cosa.
Daniele No, non si è parlato di guadagno. La mia fusoliera in quella zona non ha carbonio e quindi la soluzione "esterna" non è necessaria, nel mio caso è solo praticità. Ciao Gianni | |
| | | | Altoè Enry
Messaggi : 68
Data d'iscrizione : 21.04.10
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator Lun Feb 07, 2011 9:20 am | |
| - Gianni Vetrini ha scritto:
.....impressioni a freddo dopo l'avvenuto felice collaudo?
Enry Caro Enry, scusa la tarda risposta ma solo oggi (domenica) ho dato uno sguardo al sito dei Barbieri. Vi ringrazio molto per l'accoglienza a Nervesa e per il collaudo, le mie impressioni: come sempre un modello non da il meglio di se appena uscito dal laboratorio. Le sensazioni a caldo (e nelle elucubrazioni nel lungo viaggio di ritorno!), viaggia seduto nonostante il baricentro di default l'ho messo gia' un po' piu' indietro di quanto indicato dalla H-Model, diciamo 3-4 mm. La prova di affondata non mi piace ancora, inoltre e' lento, piu' lento dei miei altri modelli. Quindi tornato a casa ho misurato il calettamento (1,4 gradi) poi ho tolto ancora del piombo dal muso, oltre 100 g. Bisogna provare ancora e ancora. Adesso capisco anche perche' Ueli (Nyffenegger = TUN) vola sempre con un paio di litri nelle ali! Non ho provato grandi termiche (spirali strette) ma la manovrabilita' mi sembra molto buona nonostante le dimensioni. So che il modello ti interessa e quindi ti tengo aggiornato sugli sviluppi. Ciao Gianni[/quote] .... effettivamente si vedeva che non era ancora "a posto". Ciao. Enry | |
| | | | Contenuto sponsorizzato
| | Titolo: Re: Allestimento dell' ARCUS per le gare GPS - SkyNavigator | |
| |
| | | | | | Allestimento dell' ARCUS per le gare GPS - SkyNavigator | |
|
Argomenti simili | |
|
| | Permessi in questa sezione del forum: | Non puoi rispondere agli argomenti in questo forum.
| |
| |
| | Ultimi argomenti attivi | » ASSOCIAZIONI / CLUB AUTORIZZATI AI SENSI DEL RE 947/2019Lun Lug 11, 2022 6:41 pm Da LV-GDG » Vendo Nimbus 4D 7m della VagenknetVen Nov 02, 2018 5:32 am Da Thomas70 » Cerco alianti Lun Set 03, 2018 7:55 am Da Piero Pen Bertolotti » ASH 26 LET ModelMar Giu 19, 2018 12:30 pm Da Federico Barbieri» Vendo Trainatore Cessna 180Mar Mar 27, 2018 3:43 pm Da marcoswift » vendo 2 alinti da pendio un discus graupner da 4 metri e un aliante da 3 metriLun Mar 26, 2018 3:53 pm Da iz2fdu » Cerco Lun Feb 19, 2018 3:41 pm Da Matteo Ballardini » SOARMASTERLun Feb 19, 2018 3:38 pm Da Matteo Ballardini » Vendo thermik xl valentaLun Feb 19, 2018 3:37 pm Da Matteo Ballardini » ALIANTE GHIBLI 40 ANNI E NON LI DIMOSTRAVen Feb 09, 2018 8:08 am Da gato » TWIN ACRO RICORDO DI UN AMICOMer Gen 31, 2018 12:29 pm Da gato » VIDEO LS 8- 18Ven Gen 26, 2018 6:34 pm Da gato » LS 8 SCALE 1:2.3 FOTO COLLAUDOMar Gen 09, 2018 8:34 am Da gato » Vendo Arcus Mer Nov 01, 2017 1:54 pm Da marco.g » Carrello retrattileMar Ott 24, 2017 2:05 pm Da btiziano » MU 31 IL NUOVO ALIANTEAKAFLIEG MUNCHENMar Ott 24, 2017 12:43 pm Da gato » FOX JET JAGUAR IN AZIONELun Ott 16, 2017 2:04 pm Da btiziano » SEGELFLUGMESSE 2017Lun Set 18, 2017 5:26 am Da gato » AMARCORDVen Set 15, 2017 12:01 pm Da gato » PresentazioniVen Set 15, 2017 9:53 am Da gato |
| Aprile 2024 | | Lun | Mar | Mer | Gio | Ven | Sab | Dom |
|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | | 8 | 9 | 10 | 11 | 12 | 13 | 14 | | 15 | 16 | 17 | 18 | 19 | 20 | 21 | | 22 | 23 | 24 | 25 | 26 | 27 | 28 | | 29 | 30 | | | | | |  Calendario Calendario |
|
|